- ホーム
- 診療科・部門
- 整形外科・顕微鏡脊椎脊髄センター
- 症例・治療情報
- 脊椎・脊髄診療
脊椎・脊髄診療
脊椎手術
脊椎疾患の中でもっとも多いのは,脊柱管狭窄症や椎間板ヘルニアのように,脊髄や神経根を圧迫して手足のしびれ痛みや麻痺を生じる疾患です。
脊椎手術には様々なものがありますが,大別すると前方から行う手術と後方から行う手術に分けられます。そして、骨を削って神経の圧迫を除去する除圧術と、金属のスクリューを用いて脊椎を癒合させる固定術に分けることが可能です。
前方法と後方法,除圧術と固定術、それぞれに一長一短がありますが、脊椎前方手術では重要な内臓・大血管損傷の危険性がありますし、固定術では手術侵襲が大きい上に、何年か経過すると固定した上下の病変が生じることになります。
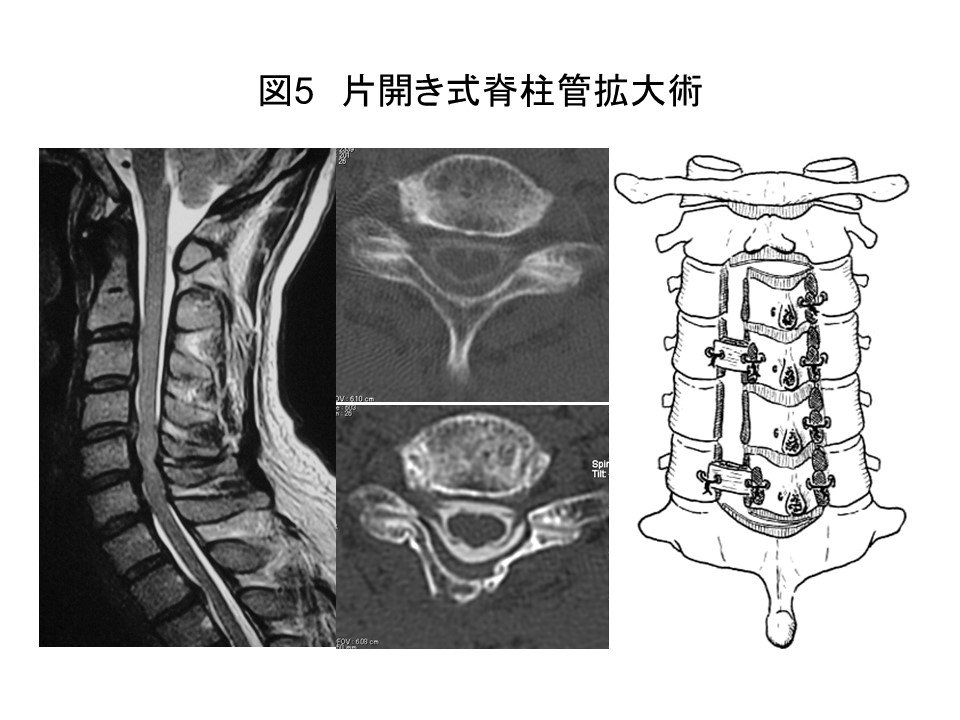
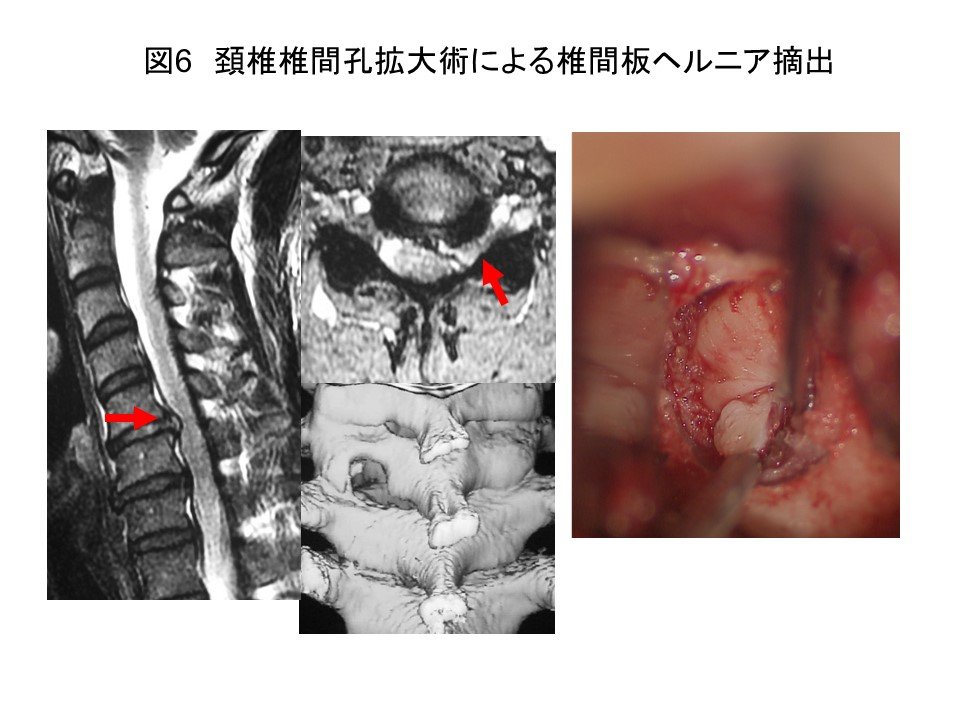
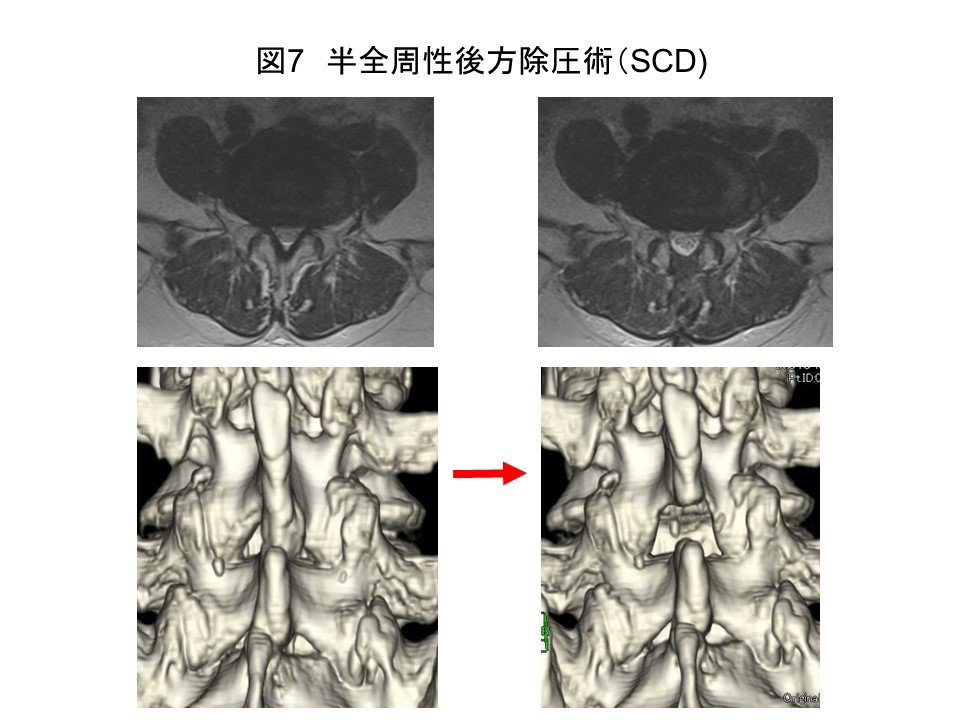
したがって後方除圧術が最も安全で低侵襲な方法であることは言うまでもありませんが、すべての疾患を後方固定術で治療できるのか,という点が問題です。通常の頚椎症性脊髄症(図5)や腰部脊柱管狭窄症(図7)はともかく、頚椎椎間板ヘルニア(図6)、歯突起後方腫瘤などの脊髄前方に病変がある疾患や、上位頚椎病変、すべり症、分離症、変性側弯症など関節不安定性をきたしやすい疾患では固定術や前方手術を選択する施設も少なくないと思います。
当科では顕微鏡を用いた手術手技を工夫することで,こうした前方病変や不安定性をきたしやすい疾患でも後方除圧術で治療するよう努めてきました。顕微鏡を用いると小さな術野でも明るく拡大された三次元的視野を得ることができますので、非常に精細な手術を行うことが可能です。最近では術中CTナビゲーションを併用することでさらに除圧術で治療できる適応を広げております。
高度の不安定性や脊柱変形がありどうしても固定術が必要となる場合には術中CTやロボットシステムを用いてできるだけ安全で正確な手術を心がけております。
脊椎疾患は高齢になるほど症状が強くなるため、低侵襲であることは非常に重要です。当科では90歳近い患者さんでも大勢手術しております。通常手術翌日より歩行可能で、約1週間で退院可能です。
できるだけ低侵襲な治療を行うために最近では腰椎椎間板ヘルニアに対しては椎間板内酵素注入療法も積極的に行っております。
脊髄手術
脊髄疾患で手術適応となる疾患としては脊髄腫瘍と脊髄空洞症などがあります。
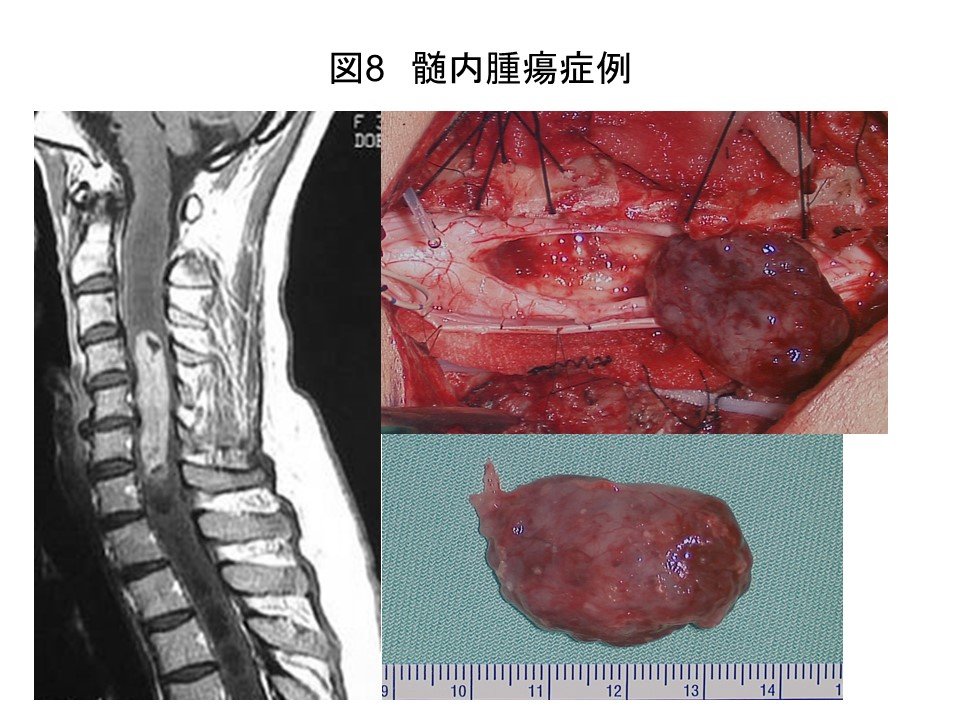
脊椎疾患に比べて非常に稀な疾患ですが、当科では2021年末までに治療した脊髄腫瘍は683例あり、特に手術が難しい髄内腫瘍(図8)も165例治療しております。
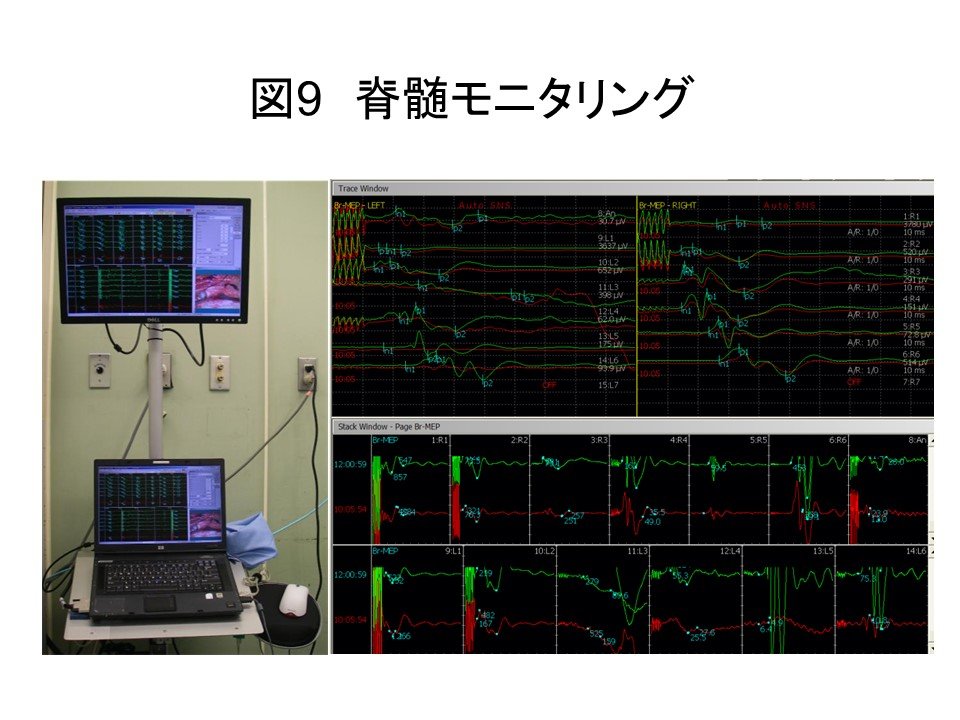
脊髄手術では術後麻痺の危険性が高いことが問題となります。特に髄内腫瘍は脊髄そのものを切開する必要があるため麻痺を起こさずに腫瘍を摘出するには精細な顕微鏡手術手技が必須です。
また、術中に神経損傷の有無を確認するための術中脊髄機能モニタリング(図9)も不可欠です。当院は日本脊椎脊髄病学会術中脊髄モニタリングワーキンググループに所属し、脊髄モニタリングの発展に努めてきました。
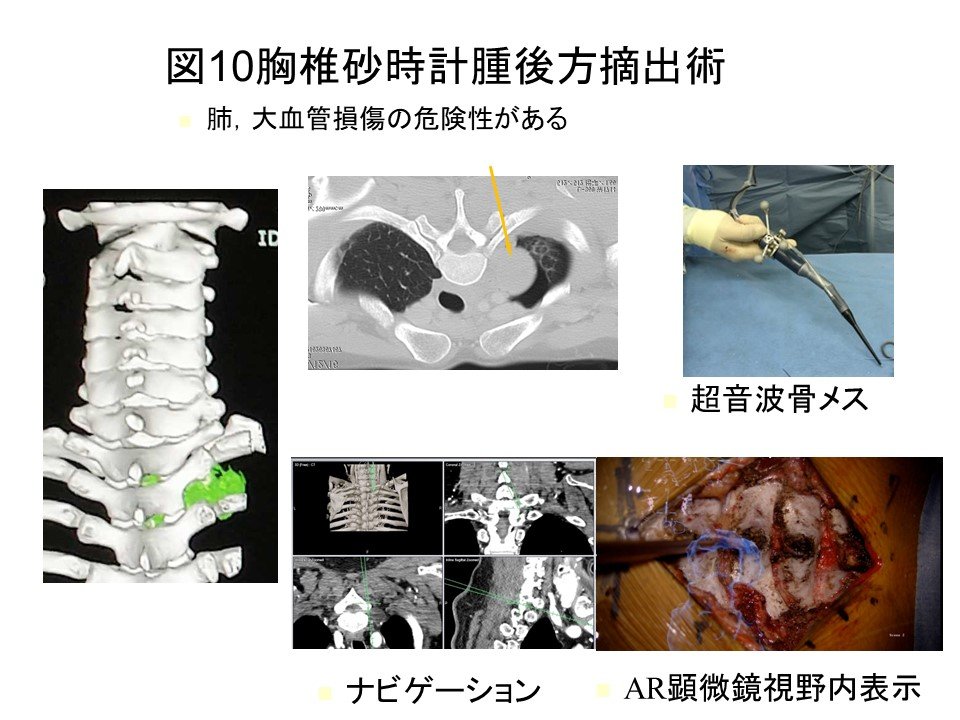
さらに、砂時計腫のような難しい腫瘍では術中超音波、ナビゲーション、術中蛍光血管造影など様々な最先端機器を駆使しながら慎重に手術を進める必要がありますが、当科ではAR顕微鏡を用いてこうした情報を顕微鏡視野内に集約して手術することが可能となっております(図10)。
脊髄空洞症は脊髄腫瘍やキアリ奇形、くも膜病変などによって生じる疾患で,上述のような工夫に加えて脊髄内視鏡を用いた手術も行っています。
脊髄腫瘍・脊髄空洞症は月曜日・水曜日に専門外来を行っております。早めの受診が必要な場合は相談してください。
主な手術機器
A)顕微鏡
当科は脊椎手術用に Leica M530/OH6 が1台、Zeiss Kinevo900 が2台の計3台の手術用顕微鏡を備えております。
手術用顕微鏡の基本的な構造についてはすでに説明しましたが,当科の顕微鏡は他にも様々な機能を備えておりますので紹介したいと思います。
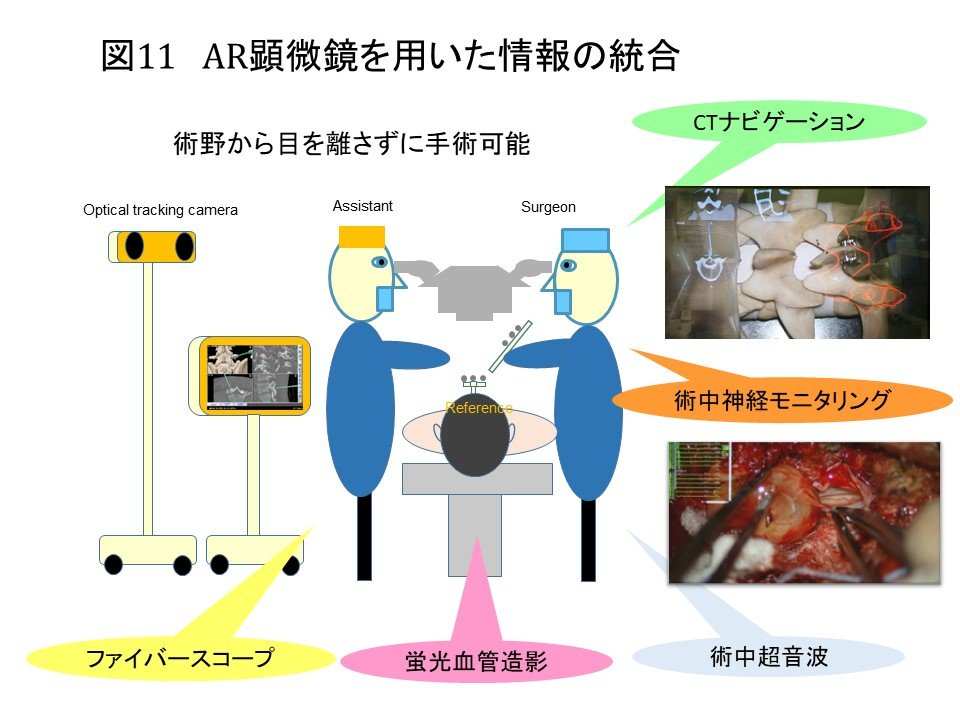
(1)AR機能(図11)
拡張現実(Augmented reality)とは視野内に様々な付加情報を表示する機能です。AR顕微鏡では顕微鏡視野内にモニタリングやナビゲーションの結果を表示することが可能ですので、術者は顕微鏡から目を離すこと無くこれらの情報を確認しつつ手術することが可能です。
(2)ナビゲーションシステムとの連携によるロボット制御
ナビゲーションシステムが顕微鏡の位置を認識することによって,顕微鏡視野内に腫瘍や骨の位置を正確に表示することができるだけでなく、ロボット制御で顕微鏡の位置を誘導することも可能です。
(3)内視鏡や外視鏡機能の搭載
顕微鏡の欠点を補うために内視鏡や外視鏡を併用することができます。
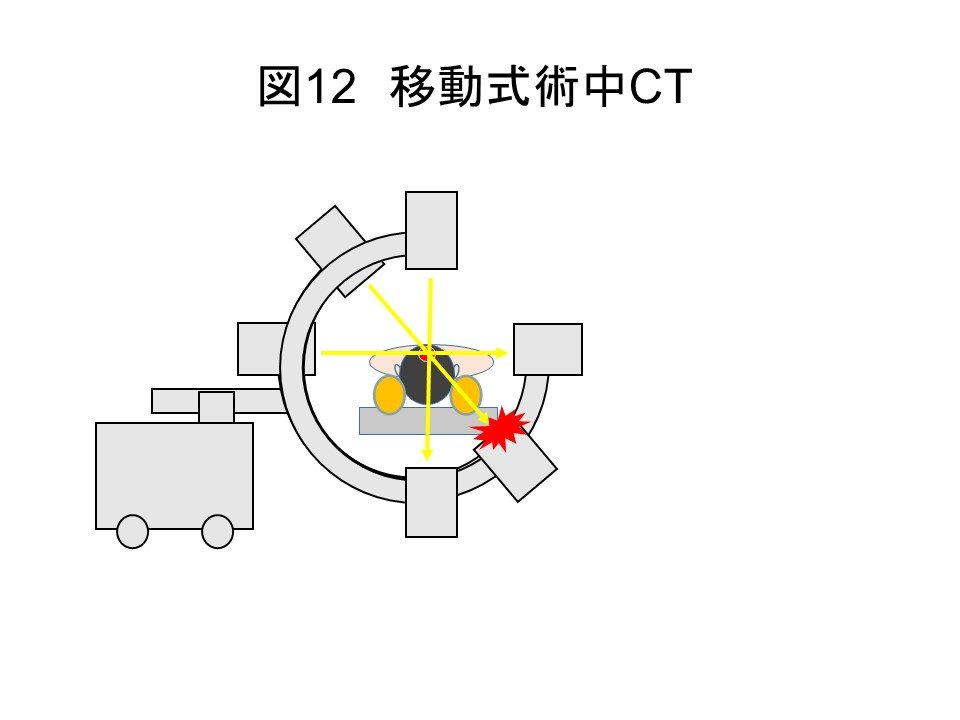
B)術中CT(図12)
術中撮影ができる施設は全国的にも多くありませんが、当科ではフラットパネル型3D-Cアーム(Siemens Cios Spin)を用いて術中CTを撮影することが可能です。一見普通のX線透視装置のようですが、簡単に高画質のCTを撮影することが可能です。術中にスクリューや腫瘍の位置などを確認することが出来るだけでなく、ナビゲーションシステムと連携して安全で正確な手術を行うことにも有用です。
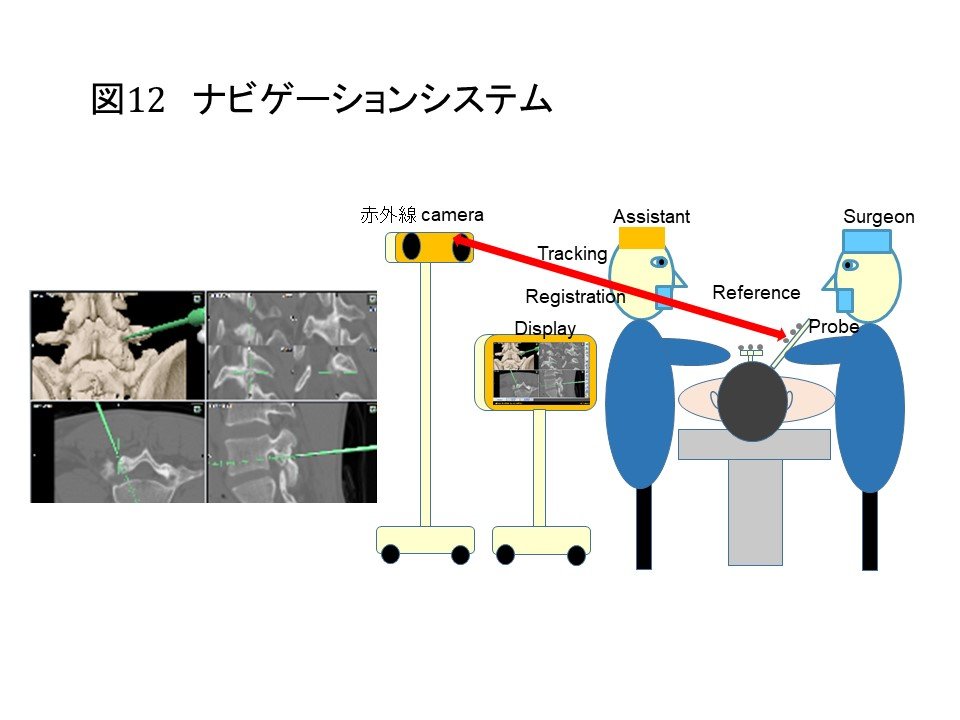
C)ナビゲーションシステム Brainlab Curve(図13)
ナビゲーションシステムは患者の体や手術器具などに赤外線センサーを装着してその相互の位置関係を把握します。そして術中CT画面で手術器具がどこに位置しているか表示してくれるもので、脊椎固定術でスクリューを挿入する際に広く用いられています。
当科では顕微鏡手術にもナビゲーションを活用しています。顕微鏡にも赤外線マーカーを装着して顕微鏡の位置、焦点などをナビゲーションすることによって、顕微鏡視野内に腫瘍や切除予定の骨組織などのランドマークを表示することができます。
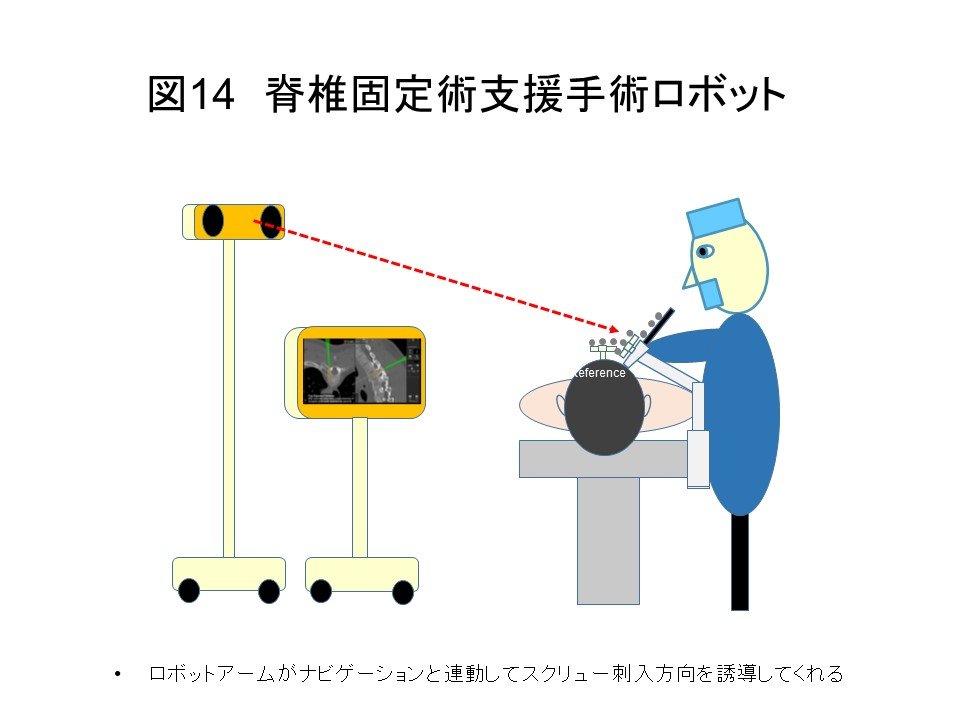
D)脊椎固定術用支援ロボット Brainlab Cirq(図14)
ナビゲーションシステムを用いてスクリューを刺入する際の問題点は,術者がナビゲーション画面を見るためには術野から目を離す必要があることです。
このロボットシステムはベッド柵に取り付けるアーム型形状をしており、ナビゲーションシステムからの情報を元に正しいスクリュー刺入方向を向くようにガイドを補正してくれます。これによって術者はナビゲーション画面を見ることなく手術に集中することが可能となります。
E)超音波骨メス(Stryker Sonopet IQ)
通常脊椎手術の骨切除には気動式あるいは電動式ドリルを用いますが、回転する器具であるために組織を巻き込む危険性があります。
超音波骨メスは振動するだけで組織を破砕しますので血管や神経などを巻き込む危険性が低く非常に安全で、従来のドリルでは削ることのできなかったような部位でも安全に削ることが出来ます。